Author = Alwan, Hassan M.
Number of Articles: 3
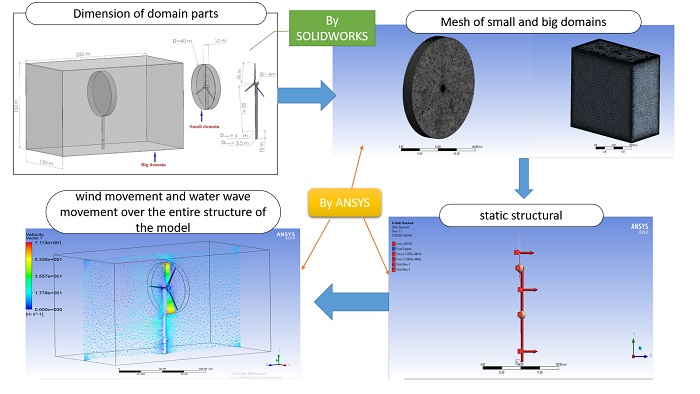
Investigation of Offshore Wind Turbine Structure Deflection Using Experimental Work, Numerical, and Theoretical Approach
Volume 41, Issue 1 , January 2023, , Page 159-175
Abstract
Electrical energy from offshore wind turbines is an important source of clean, renewable energy production. One of the reasons for the low efficiency of wind turbines is the change ... Read More ...
Modeling and Control of Wheeled Mobile Robot With Four Mecanum Wheels
Volume 39, 5A , May 2021, , Page 779-789
Abstract
This work presents a driving control for the trajectory tracking of four mecanum wheeled mobile robot (FMWMR). The control consists of Backstepping-Type 1 Fuzzy Logic-Particle swarm ... Read More ...
Pose Estimation of Objects Using Digital Image Processing for Pick-and-Place Applications of Robotic Arms
Volume 38, 5A , May 2020, , Page 707-718